车位到车位
车位到车位是一项智能驾驶辅助功能,在驾驶员的监督下,通过智能驶出,代客泊车,全场景智能驾驶(NOA),智能泊车等辅助驾驶功能的融合,车辆完成两个已学习车位间的一键智驾,实现从车位到车位的辅助驾驶。
 警告
警告
- 车位到车位是一项辅助驾驶功能,无法应对所有道路情况,您作为车辆驾驶人对行车安全承担主要责任,请全程握好方向盘并观察路况,如遇危险请及时接管车辆,请勿依赖本功能控制车辆,否则可能导致严重伤害或死亡。
- 城市智能驾驶与高速智能驾驶的警告与局限性同样适用于车位到车位的行车过程,本文主要描述园区附近行泊内容。
路线学习
 提示
提示
- 功能使用需设置全场景智能驾驶和代客泊车处于开启状态。
- 除车位泊入过程,驾驶员必须手动驾驶车辆完成路线学习,不可以使用智能驾驶功能。
- 路线学习过程中,须保持车速小于 25 km/h。
- 每个闸机仅支持 1 条停车路线与驶出路线的学习和保存,路线学习后,不再进行学习提示。
- 目前适用于带闸机的园区停车环境内,包含停车楼,地下车库以及地面停车场。
- 车辆停在坡道上时,无法使用车位到车位功能,请在平地上使用。
- 为提升路线学习质量,请尽量避免在夜晚、雨天等能见度不佳的条件下学习路线。
第一步:驾驶车辆行驶至园区入口附近,并降低车速至 30 km/h 以下,当车辆通过闸机进入园区后,中控屏弹出停车路线学习提示,点击【开始学习】按钮,并手动驾驶车辆前往目的车位。
提示
自动学习泊车路线开关开启后,当车辆通过闸机需要学习停车路线或从车位出发需要学习驶出路线时,系统将自动进行路线学习。

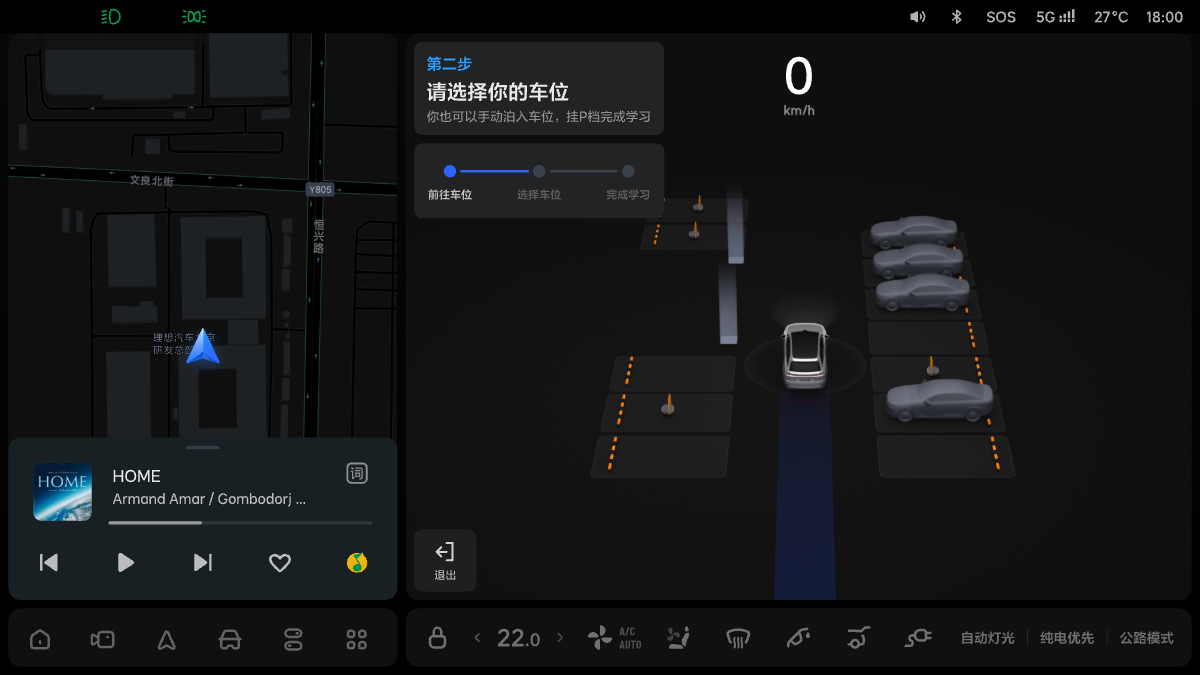
第二步:到达目标车位附近后,停车选择目标车位,并启动自动泊车功能,车辆将自动泊入并完成路线学习。
提示
选择目标车位后,驾驶员可手动泊入车位并切换至 P 挡完成路线学习。
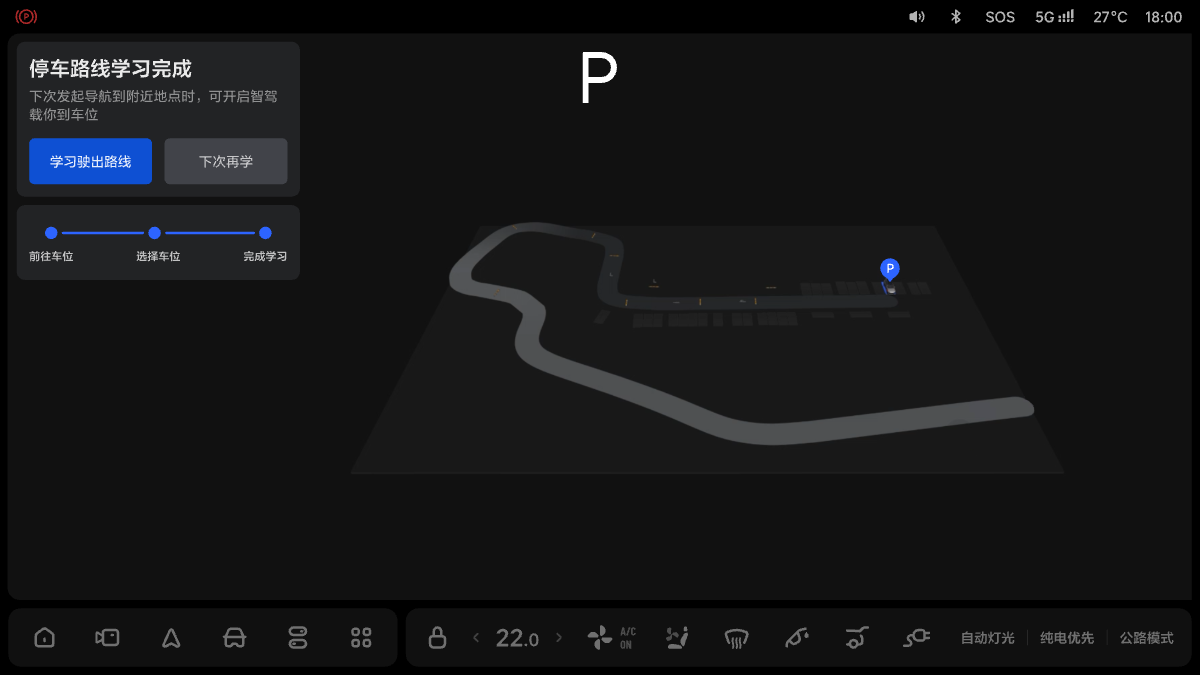
第三步:停车路线学习完成后,点击【学习驶出路线】按钮,继续学习驶出路线,或下次上车后再进行驶出路线学习。
提示
进行驶出路线学习时,请确认外后视镜已展开。
第四步:手动驾驶车辆驶出车位、通过闸机、驶入公共道路并保持低速行驶,直至语音提示路线学习完成。

提示
在下列情况,可能会导致路线学习失败:
- 车速超过 25 km/h。
- 在路线行驶过程中长距离倒车。
- 坡度过大。
- 路线长度大于3 千米。
- 设定路线泊入车位时,未泊入车位线框内。
- 有急加速、急转向、急刹车等激进驾驶动作。
- 打开任一车门、后备厢门、前舱盖或关闭后视镜等操作。
- 在同一车道同时存在正向和逆向行驶。
路线使用
提示
停车场存在多个闸机时,建议将导航目的地设置为已完成路线学习的闸机位置。激活车位到车位功能,需要同时满足以下条件:
- 全场景智能驾驶和代客泊车设置处于开启状态。
- 已分别完成两个园区内固定车位的停车路线及驶出路线学习。
- 在已学习路线的车位中或在已学习路线上且车辆当前行驶方向与学习路线时的方向一致。
- 外后视镜未折叠。
- 方向盘回正。
- 所有车门、后备厢门及前舱盖关闭。
- 所有乘客系好安全带。
- 雷达和摄像头功能正常。
车辆在已学习路线的车位上,导航设置其他已学习目的地园区的入口后,驾驶员可通过点击中控屏或向下连续拨动 2 次换挡杆激活车位到车位辅助功能。

警告
- 进出园区时,会涉及到智能驾驶与代客泊车功能的切换,存在失败风险,您作为车辆驾驶人对行车安全承担责任,请全程握好方向盘并观察路况,如遇危险情况请及时接管车辆,请勿依赖本功能控制车辆,否则可能导致伤害或死亡。
- 出园区时,请监管并确保车辆行驶至正确的驶出路线出口,否则会导致出园区后的智能驾驶功能自动启用失败。
- 进园区时,请监管并确保车辆行驶至正确的停车路线起点,且行驶方向与学习路线方向一致,否则会导致代客泊车功能自动启用失败,无法进入园区泊入目标车位。
- 使用车位到车位辅助功能过程中,车辆距离障碍物过近或存在碰撞剐蹭危险时,系统会发出告警音,需要您注意观察环境,随时准备接管车辆。
- 车位到车位辅助可能无法通过狭窄弯道处,需要您随时准备接管车辆通过。
- 车位到车位辅助可能无法绕行低速或静止障碍物,需要您随时准备接管车辆通过。
- 车位到车位功能是一项全新的功能,仍在持续优化中。
路线管理
当车辆到达已学习路线车位或已学习路线上时,可进入泊车页面,点击【更多】图标,会弹出路线管理界面可对当前路线进行删除和重命名的操作,用户也可以在代客泊车设置界面进行全量车位管理。

功能退出
当车位到车位辅助功能异常退出或用户操作退出时,需要驾驶员接管驾驶。
车位到车位辅助功能激活后,车辆状态不满足运行条件时,系统将自动退出:
- 车辆偏离已学习路线时;
- 系统发生故障。
车位到车位辅助功能激活后,当用户进行下列操作时会退出车位到车位辅助:
- 向上拨动换挡杆;
- 踩下制动踏板;
- 转动方向盘;
- 车内人员解开安全带;
- 打开车门;
- 打开后备厢门;
- 折叠后视镜。
警告
- 因道路环境复杂,车辆在闸机附近,无法完成智能驾驶和代客泊车衔接时,会提示智能驾驶退出信息,请及时接管车辆。
- 若车辆通过仪表、语音播报等方式发出接管请求,应立即接管。
- 若发现危险,或出现需要接管的场景,应立即接管,切勿等待车辆发出接管请求。
- 系统可能无法在所有紧急情况下都发出接管请求,驾驶员必须时刻保持对环境的观察,在存在危险时,驾驶员需要及时接管车辆,避免危险发生。
提示
车位到车位辅助功能退出后,若中控屏出现可激活提醒,可通过点击中控屏提示信息再次激活车位到车位辅助功能。
功能局限性
车位到车位辅助是辅助功能,无法完全代替驾驶员进行环境信息的判断,车位到车位在以下情况存在局限性。
车位到车位无法应对所有路况和环境,以下场景请勿使用或开启车位到车位功能:
- 驾驶员不在驾驶位时。
- 车辆在坡道上时。
- 学习路线上有消防栓、栏杆等无法探测的悬空物体时。
- 道路前方车辆上下人时。
- 黑暗或照明条件差的地下停车场。
- 行驶路径中存在行人、骑行者、其他车辆和物体时。
- 遇到穿行的行人、骑行者、其他车辆或动物时。
- 遇到身材矮小、蹲坐、躺下或被其他物体遮挡住的人员时。
- 车位上有乘用车以外的车辆时,如叉车、手推车、购物车等。
- 在距离较近的两个相邻停车场均有设定路线时。
- 目标车位旁空间狭小或接近道路的尽头时。
泊车系统无法在机械系统不满足的条件下进行泊车,会影响泊入车位效果或无法泊入车位,包含但不限于:
- 安装雪地防滑链;
- 使用了非原尺寸轮胎;
- 轮胎胎压不足或不一致;
- 方向盘加装了较重的方向盘套,导致泊车控制过程中无法精准控制转向按照预期角度工作。
传感器局限性
泊车系统工作时,受超声波雷达特性影响,以下情况下可能造成泊车系统对障碍物识别效果下降或不识别,导致车辆损坏或人身伤害,包括但不限于:
车位内或车位旁存在明显的地面接缝或裂缝。
- 车位内或车位旁存在水沟、水沟盖板或窨井盖。
- 较矮小的物体、保险杠下的物体、离车辆太近或太远的物体。
- 无法探测到的悬空物体。
- 周围有同频率的超声波杂音,如金属声、排气声等。
- 障碍物是铁丝网、篱笆、柱子、绳索、购物车等细小无法反射有效声波的物体时。
- 障碍物是雪、棉质或表面易吸收声波的物质时。
- 系统不会每次都检测到车辆附近的行人、儿童或动物。
- 障碍为锥状物体或表面倾斜物体时。
- 障碍为墙角、车辆尾部等直角类物体。
- 在草地或崎岖不平的路面。
- 当雷达附近出现温度分层。
- 超声波雷达受损、错位或被异物遮挡。
摄像头同样存在一定局限性,以下情况可能影响泊车系统的正常工作,包括但不限于:
- 左右外后视镜或车头车尾摄像头受损,导致摄像头不能工作或错位。
- 摄像头污损或被遮挡。
- 环境亮度过亮,比如摄像头被阳光直射。
- 环境亮度过暗,比如无灯光照射的地库或夜晚。
- 环境亮度变化较大,不一致,比如斑驳的树影下、反光的地坪漆车位。
- 车位线不清晰或车位线与车位颜色对比不明显,比如地砖车位、车轮经过水面后留下的轮印。
- 非常规的车位,比如前后宽度不一致的梯形车位或停车楼的弧形车位。
- 车位旁存在圆形、方形柱子。
- 障碍物局部侵入或紧贴车位。
- 系统可能无法判断并排除有禁停标线、锥桶、限停牌、地锁的车位或者专用车位。
- 系统可能无法排除车位内有障碍物的车位,如行人、自行车、三轮车、低矮杂物、砖头等。
- 踢脚线颜色与地面颜色相同的水泥柱。
- 涂鸦车位。

警告
以上警告、注意及限制未尽述影响车位到车位正常工作的所有情况,车位到车位作为一项辅助驾驶功能,无法应对所有交通与路况。您需要承担车辆控制的主要责任,使用时请您时刻保持警惕并观察路况,在必要时采取纠正措施,并及时接管车辆。请勿等待接管请求发出后再接管车辆,否则可能导致严重伤害或死亡。