遥控泊车
遥控泊车包括离车泊入和关门泊入两种功能。
 警告
警告
- 遥控泊车功能仅为辅助驾驶功能,无法应对所有泊车场景,该功能不能代替您对周围状况的观察和判断,请您在使用该功能的过程中,全程关注车辆周围环境,保持车辆控制,如果发现使用该功能可能导致剐蹭或其他风险,请立即停止使用该功能。
- 遥控泊车功能是否可以使用,请以当地法律规定为准。
离车泊入功能使用
离车泊入是在使用智能泊车功能找到车位后,用户可以离车使用手机 App 控制车辆完成泊车的操作,解决狭窄车位泊入后上下车不便利的问题。
 提示
提示
为保证安全,使用离车泊入需要满足以下条件:
- 已完成离车泊入功能的学习考试;
- 自动泊车功能设置已开启;
- 手机蓝牙钥匙连接车辆。
- 在中控屏>【设置】>【AD Pro】>【智能泊车】>【自动泊车】开启与关闭自动泊车功能。

- 使用智能泊车功能寻找到合适的车位,点击【离车后泊入】按钮,待系统将挡位置于 P 挡后,下车关好车门。

- 打开手机上的理想汽车 App,点击车控页【离车泊入已就绪,点击进入】卡片,等待页面加载完成后,点击【开始】,车辆将开始自主泊入车位。
提示
泊车过程中距离障碍物过近或存在碰撞剐蹭危险时,需要您注意观察环境,随时准备点击【暂停】停止车辆。
- 泊入完成后自动切换至 P 挡并在 30 秒内自动锁止车辆。
- 暂停和恢复
离车泊入功能进行自主泊车的过程中,用户可以根据周边环境随时在手机 App 上点击【暂停】主动暂停泊车。
功能暂停后,用户可以在页面上点击【继续】继续泊车:

- 功能退出
离车泊入使用过程中,由于用户操作或周边环境干扰,造成系统可恢复型退出,包含以下操作:
- 打开后备厢。
- 打开车门。
- 打开前舱盖。
- 功能暂停超过 30 秒没有恢复。
- 蓝牙中断。
- 锁屏、手机来电、切换应用等原因离开离车泊入操作页面。
可恢复型退出时,用户可根据提示排除退出原因后,App 端点击【重试】恢复功能,也可以点击【退出泊入】退出离车泊入功能。
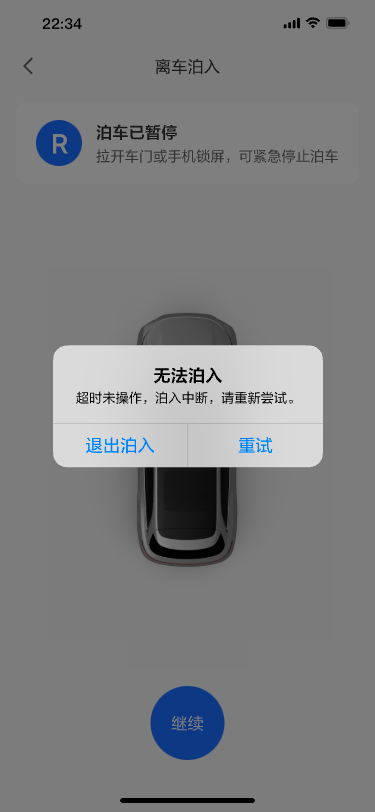
离车泊入使用过程中,由于系统故障或规划轨迹失败,造成系统不可恢复退出,需要用户手动上车完成泊入,App 端提示如下:
关门泊入功能使用
关门泊入是在使用智能泊车功能找到车位后 ,用户携带智能钥匙或蓝牙钥匙下车,通过长按门把手的方式触发泊入, 操作过程更加便捷流畅。
- 使用智能泊车功能寻找到合适的车位,点击【离车后泊入】,将挡位置于 P 挡后,离车并关好车门。

提示
- 首次使用时请仔细阅读使用说明。
- 下车前请带走智能钥匙和手机。
- 下车后长按主驾门把手 2 秒,功能激活后双闪亮起,保持与车辆 1 米以上距离,车辆自主起步。

提示
- 激活功能时请保证主驾门把手干净整洁。
- 激活时需要保证手机蓝牙连接车辆或智能钥匙在车周 5 米范围内。
- 功能运行过程中,您可以通过按压智能钥匙任一按键、手机 APP 车控页【暂停】按键,暂停此次泊入。

提示
- 功能运行过程中,需要您时刻关注周边环境安全,并在有安全风险时及时暂停车辆。
- 若车辆未及时响应暂停,您可通过拉开车门紧急停车。
- 车辆暂停后,您可通过按压智能钥匙任一按键、手机 APP 车控页【继续】按键,继续此次泊入。

提示
- 暂停超过 30 秒后,需要长按主驾门把手 2 秒,可继续此次泊入进程。
- 若您拉开车门,关闭车门后需要长按主驾门把手 2 秒,可继续此次泊入进程。
- 泊入完成后自动切换至 P 挡并在 30 秒内自动锁止车辆。
功能局限性
遥控泊车是辅助功能,无法完全代替驾驶员进行环境信息的判断, 不能保证每次泊车都能成功,在以下这些情况存在局限性。
当泊车系统在机械系统或外界环境不满足的条件下运行时,会影响泊车车位效果或无法泊入车位,包括但不限于:
- 安装了雪地防滑链。
- 使用了非原尺寸轮胎。
- 轮胎胎压不足或不一致。
- 方向盘加装了较重的方向盘套,导致泊车控制过程中无法精准控制转向按照预期角度工作。
泊车系统工作时,受超声波雷达特性影响,以下情况下可能造成泊车系统对障碍物识别效果下降或不识别,导致车辆损坏或人身伤害,包括但不限于:
车位内或车位旁存在明显的地面接缝或裂缝。
- 车位内或车位旁存在水沟、水沟盖板或窨井盖。
- 较矮小的物体、保险杠下的物体、离车辆太近或太远的物体。
- 无法探测到的悬空物体。
- 周围有同频率的超声波杂音,如金属声、排气声等。
- 障碍物是铁丝网、篱笆、柱子、绳索、购物车等细小无法反射有效声波的物体时。
- 障碍物是雪、棉质或表面易吸收声波的物质时。
- 系统不会每次都检测到车辆附近的行人、儿童或动物。
- 障碍为锥状物体或表面倾斜物体时。
- 障碍为墙角、车辆尾部等直角类物体。
- 在草地或崎岖不平的路面。
- 当雷达附近出现温度分层。
- 超声波雷达受损、错位或被异物遮挡。
摄像头同样存在一定局限性,以下情况可能影响泊车系统的正常工作,包括但不限于:
- 左右外后视镜或车头车尾摄像头受损,导致摄像头不能工作或错位。
- 摄像头污损或被遮挡。
- 环境亮度过亮,比如摄像头被阳光直射。
- 环境亮度过暗,比如无灯光照射的地库或夜晚。
- 环境亮度变化较大,不一致,比如斑驳的树影下、反光的地坪漆车位。
- 车位线不清晰或车位线与车位颜色对比不明显,比如地砖车位、车轮经过水面后留下的轮印。
- 非常规的车位,比如前后宽度不一致的梯形车位或停车楼的弧形车位。
- 车位旁存在圆形、方形柱子。
- 障碍物局部侵入或紧贴车位。
- 系统可能无法判断并排除有禁停标线、锥桶、限停牌、地锁的车位或者专用车位。
- 系统可能无法排除车位内有障碍物的车位,如行人、自行车、三轮车、低矮杂物、砖头等。
- 踢脚线颜色与地面颜色相同的水泥柱。
- 涂鸦车位。
警告
以上警告、注意及限制未尽述影响遥控泊车正常工作的所有情况,遥控泊车作为一项辅助驾驶功能,无法应对所有交通与路况。您需要承担车辆控制的主要责任,使用时请您时刻保持警惕并观察路况,在必要时采取纠正措施,并及时接管车辆。请勿等待接管请求发出后再接管车辆,否则可能导致严重伤害或死亡。